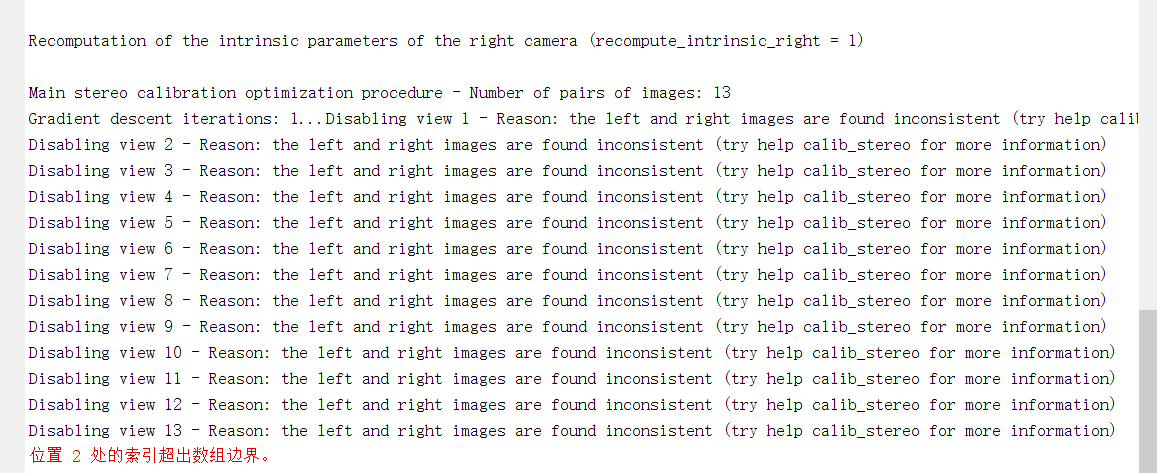
最近在用MATLAB标定工具箱进行相机的双目标定,因为我只有一个相机(通过相机的旋转用单目代替双目),从两个不同的角度拍摄同一幅棋盘格标定图,用calibration toolbox出现了以下问题
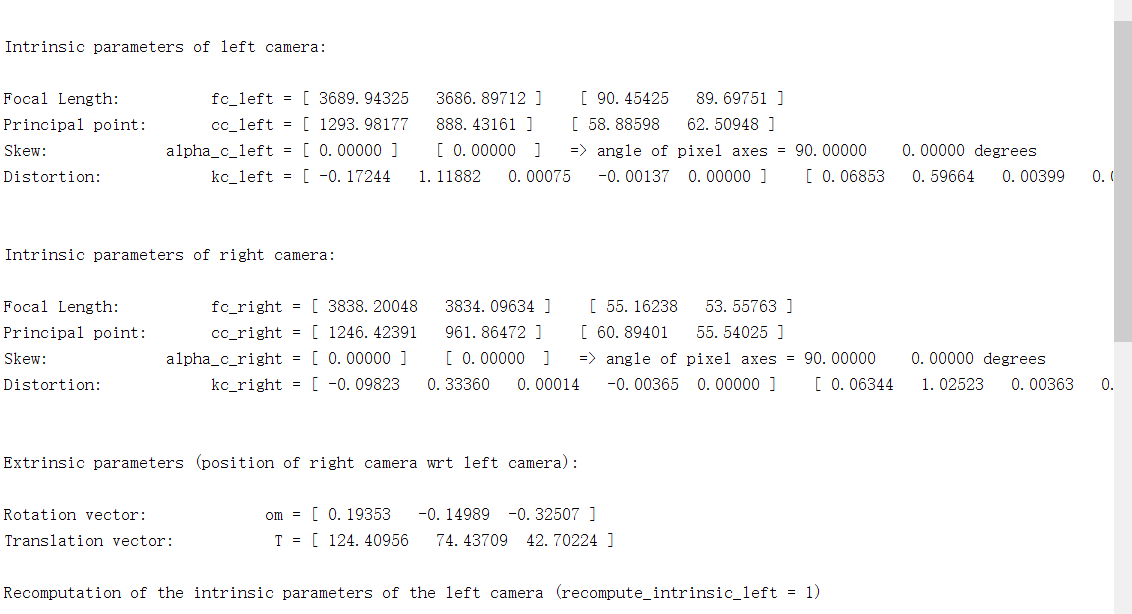
,虽然左图像和右图像不连续,但是好像旋转向量和平移矩阵得出来了,不知道这样会不会误差很大?有没有遇到过类似问题的博主啊?
这是我的左右相机棋盘格标定图对
已经解决了
 ,虽然左图像和右图像不连续,但是好像旋转向量和平移矩阵得出来了,不知道这样会不会误差很大?有没有遇到过类似问题的博主啊?
,虽然左图像和右图像不连续,但是好像旋转向量和平移矩阵得出来了,不知道这样会不会误差很大?有没有遇到过类似问题的博主啊?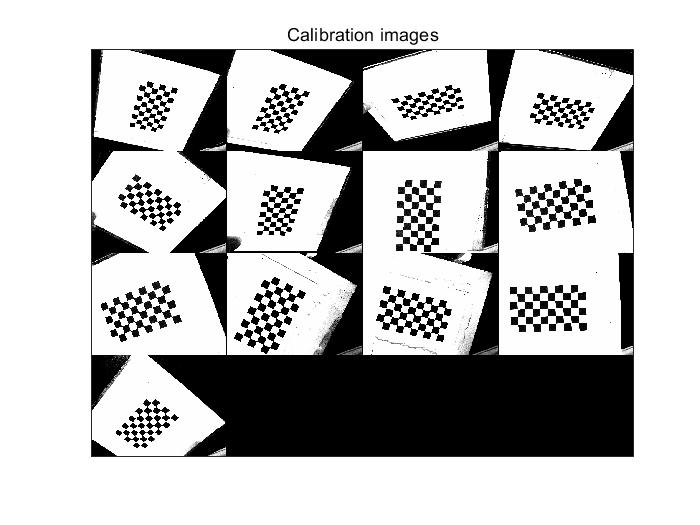











已经解决了
– 不忘初心zyz 5年前